
Il radar vede un contatto. L’AIS mostra un nome, se il natante decide di trasmetterlo. Quando un USV ostile non fa né l’uno né l’altro, l’IA ottica è l’unico sistema che lo individua comunque. Questo è il vuoto che SEA.AI ha sviluppato per colmare.

SEA.AI sta crescendo in Nord America: nuovo team, migliore assistenza, maggiore disponibilità. Stiamo rafforzando la nostra presenza in tutto il Nord America con nuovi talenti, un’assistenza più estesa e un più ampio accesso ai nostri sistemi di sicurezza.
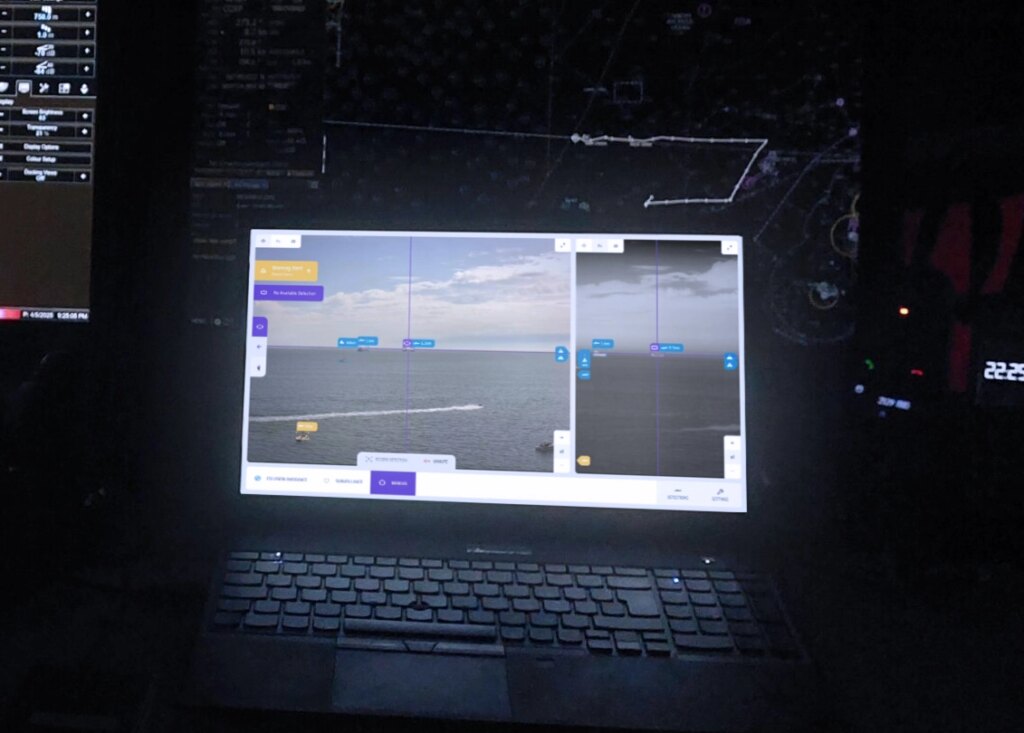
La rilevazione ti dice cosa c’è in mare. Il tracciamento multi-oggetto ti dice cosa è ogni contatto, da dove viene e dove sta andando, per ogni oggetto nella scena simultaneamente. Questa è la differenza tra uno snapshot e un’intelligenza operativa.